
Contents
Competition Overview
The Virtual Robot Competition is part of RoboCup Rescue Simulation League.
Sydney 2019
The 2019 competition will be held in Sydney, Australia from July 1 – July 8, 2019.
Technical Committee:
Fatemeh Pahlevan Aghababa (Sharif University of Technology), Amirreza Kabiri (Amirkabir University of Technology), Josie Hughes (Cambridge University)
Software
The RoboCupRescuePackage and the robot & field models used in the previous competitions are available at this GitHub repository.
Asia Pacific 2018
The RoboCup Asian-Pacific Open competition 2018 will be held in Kish, Iran from December 5 – December 10, 2018.
Seven teams from Iran already pre-registered for the competition.
Technical Committee:
Fatemeh Pahlevan Aghababa (Sharif University of Technology), Amirreza Kabiri (Amirkabir University of Technology)
Montreal 2018
The 2018 competition was held in Montreal, Canada from June 16 – June 21, 2018.

Technical Committee:
Masaru Shimizu (Chukyo University), Fatemeh Pahlevan Aghababa (Sharif University of Technology)
Organizing Committee:
Masaru Shimizu (Chukyo University), Fatemeh Pahlevan Aghababa (Sharif University of Technology), Francesco Amigoni (Politecnico di Milano), Amirreza Kabiri (Amirkabir University of Technology)
Competition Poster
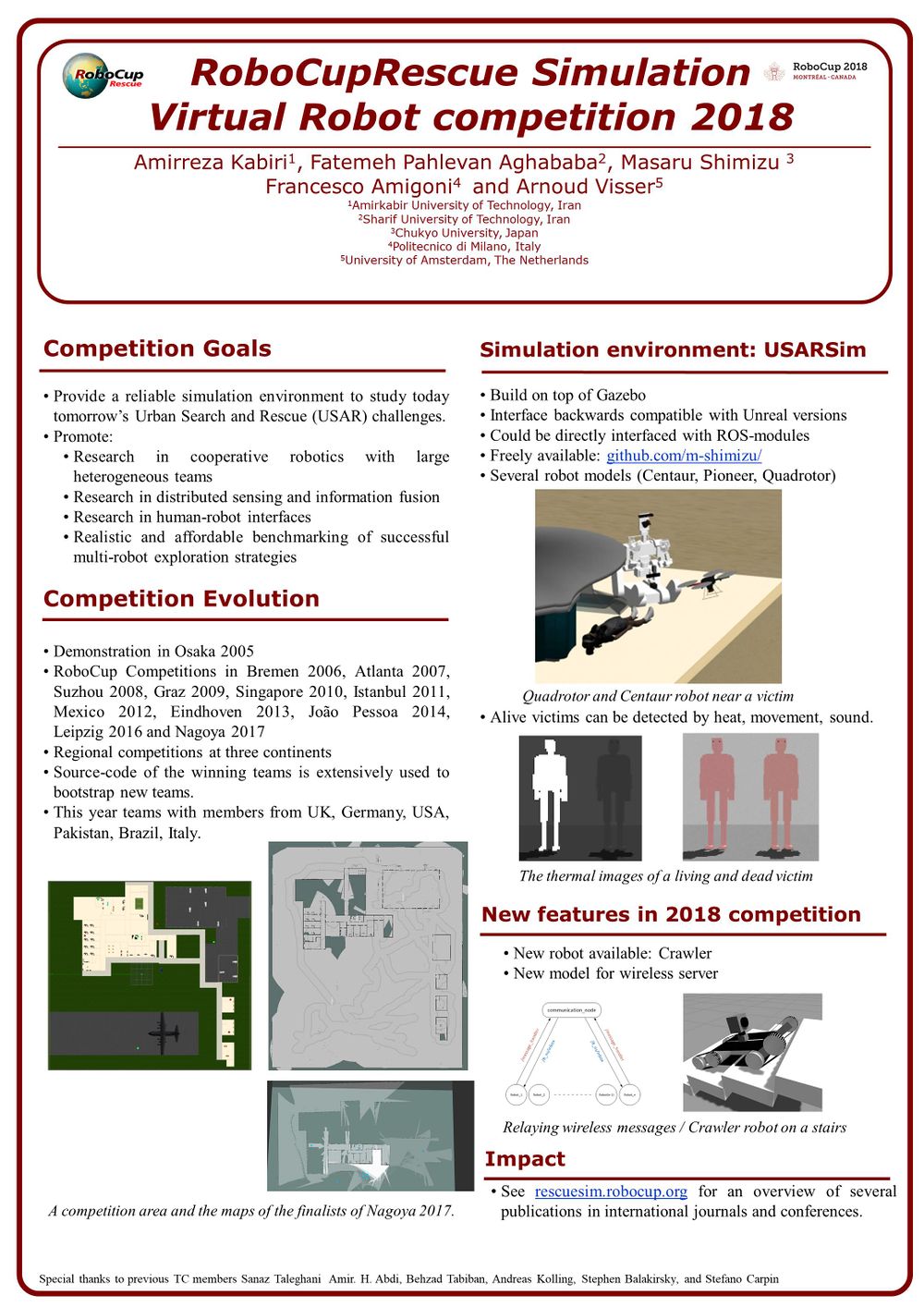
The progress achieved in 2018 is summarized in the following poster:
Software
For the moment you can use the robot model and field models used in RoboCup World Championship 2018 Rescue Simulation Virtual Robot League (RC2018RVRL).
Rules
The rules for the RoboCup 2018 Virtual Robot Competition are available: version 1.2 – May 12, 2018. With respect to the rules of 2017, we included a tool to realistically simulate communication between robots and request to deliver a map of the explored area to the jury.
Participating teams
The following teams are competing in Montreal:
- Cambridge Robotics (UK) – (PDF)
- Edinbots (UK) – (PDF)
So this year the competition will have two teams from two top-universities.
Results
Detailed results can be found in this document.
Summarized:
| Round | competitors | victims found | map explored |
|---|---|---|---|
| Preliminary #1 | Edinbots vs Cambridge Robotics | 0 vs 3 victims | 0% vs 20% of the map explored |
| Preliminary #2 | Edinbots vs Cambridge Robotics | 0 vs 0 victims | 3% vs 6% of the map explored |
| Preliminary #3 | Edinbots vs Cambridge Robotics | 0 vs 0 victims | 9.5% vs 9.2% of the map explored |
| Round | competitors | victims found | map explored |
|---|---|---|---|
| Final #1 | Edinbots vs Cambridge Robotics | 2 vs 2 victims | 37% vs 61% of the map explored |
| Final #2 | Edinbots vs Cambridge Robotics | 1 vs 3 victims | 32% vs 41% of the map explored |
| Final #3 | Edinbots vs Cambridge Robotics | 1 vs 3 victims | 32% vs 27% of the map explored |
| Final #4 | Edinbots vs Cambridge Robotics | 1 vs 1 victims | 29% vs 24% of the map explored |
Score
| Team | Preliminaries | Finals |
|---|---|---|
| Cambridge Robotics | 0.108 points | 1.383 points |
| Edinbots | 0.032 points | 1.356 points |
Qualified teams
The following teams have qualified and have pre-registered (in no particular order):
- Global Variable (USA/Germany/Brazil/Pakistan/Italy) – (PDF)
- SOS_VR (Iran) – (PDF)
- Cambridge (UK) – (PDF)
- Echoic (Iran) – (PDF)
- Edinburgh (UK) – (PDF)
- MIC_VR (Iran) – (combination of the teams Allameh Tabatabaei and ATRT)
So this year the competition could have six teams from seven countries. Note that these are draft versions, that will be replaced with for the camera-ready versions on May 25.
Call for Participation
We would like to invite all robot rescue teams to participate in the 2018 RoboCup Rescue Simulation League World Championship.
The Virtual Robot Competition has been largely renewed since 2016, both in terms of the simulation environment, with the transition from an Unreal-based environment to a ROS/Gazebo based environment, and in terms of challenges and rules.
If you are interested to participate please take the time to pre-register your team for the RoboCup 2018 Virtual Robot Competition as soon as possible, so that we can inform you about the latest developments.
1) RoboCup Rescue Simulation League and Virtual Robot Competition
The RoboCup Rescue Simulation League is a socially relevant part of RoboCup event. Its main purpose is to provide emergency decision support by integration of disaster information, prediction, planning, and human interface.
A generic urban disaster simulation environment is constructed on network computers. Heterogeneous intelligent agents such as firefighters, commanders, victims, volunteers, etc. conduct search and rescue activities in this virtual disaster world. Agents can sense their environment and make decisions on the basis of the perceived data. Mission-critical human interfaces support disaster managers, disaster relief brigades, residents, and volunteers to decide their actions to minimize the disaster damage.
Addressing this problem involves advanced and interdisciplinary research themes. As AI/robotics research, for example, behavior strategy (e.g., multi-agent planning, real-time/anytime planning, heterogeneity of agents, robust planning, mixed-initiative planning) is a challenging problem. For disaster researchers, RoboCup Rescue works as a standard basis in order to develop practical comprehensive simulators adding necessary disaster modules.
Since 2016, the Virtual Robot Competition is based on ROS/Gazebo, an advanced robot simulator in which users can simulate multiple agents whose capabilities closely mirror those of real robots. ROS/Gazebo currently features several ground and air robots, as well as a wide range of sensors and actuators. Moreover, exploiting ROS, users can easily develop their robot systems integrating standard modules.
2) Pre-registration
If you are interested to participate in the competition, please send, before January 15, 2018, an email to reyhanehpahlevan@ce.sharif.edu with as attachment the following form filled in: http://ce.sharif.edu/~reyhanehpahlevan/Robocup/IntentVirtual2018.txt.
3) Qualification material
Besides sending the intention of participation, please prepare before March 15, 2018, a Team Description Paper describing the most innovative contributions or scientific results your team is intended to provide. The TDP is limited to 8 pages and must be formatted according to the LNCS format:
http://www.springer.com/gp/computer-science/lncs/conference-proceedings-guidelines
The Team Description Paper is an overview of the methodologies you use or intend to use to control your robots inside the Virtual Robot Competition. If applicable, include a reference to your latest publications. The qualification material should be placed on a dedicated web page on the team’s home page.
Please include the link to the qualification material on the intention of participation information.
Documentation
For more information:
– RoboCup Rescue Simulation League
– Gazebo/ROS and Virtual Robot setup Tutorials
– Tutorials and links to repositories for the simulation environment
– A demo
– Simulated worlds from previous competitions
– Document describing the transition to the new simulator
History
Nagoya 2017
The 2017 competition will be held in Nagoya, Japan.
Technical Committee:
Francesco Amigoni (Politecnico di Milano), Shimizu Masaru (Chukyo University), Fatemeh Pahlevan Aghababa (Sharif University of Technology)
Organizing Committee:
Shimizu Masaru (Chukyo University), Fatemeh Pahlevan Aghababa (Sharif University of Technology)
Rules
The current version of the rules for the RoboCup 2017 Virtual Robot Competition is version 1.0 – April 19, 2017.
Qualified teams
The following teams have qualified (in no particular order):
- Chukyo Rescue A (Japan) – (PDF)
- Chukyo Rescue B (Japan) – (PDF)
- Echoic (Iran) – (PDF)
- MRL (Iran) – (PDF)
- SOS VR (Iran) – (PDF)
- Yildiz (Turkey) – (PDF)
The following content is a copy of the page maintained at http://www.robocuprescue.org/, a site which is unfortunately no longer available for the community.
Leipzig 2016
The 2016 competition is being held in Leipzig, Germany.
The Virtual Robot Competition will be largely renewed (also as outcome of The Future of Robot Rescue Simulation Workshop to be held from February 29 to March 4, 2016, in Leiden, Netherlands) both in terms of simulation environment, with the transition from the current Unreal-based environment (which has been used in the previous years) to a ROS/Gazebo based environment, and in terms of challenges and rules.
Important dates:
* team pre-registration: originally January 31, 2016, extended to March 30, 2016 (see below for instructions). * qualification material deadline: March 30, 2016 (see below for instructions). * team qualification notification: April 5, 2016. * team setup: June 28-29, 2016. * competition: June 30 - July 3, 2016. * RoboCup symposium: July 4, 2016.
Technical Committee:
Francesco Amigoni (Politecnico di Milano), Shimizu Masaru (Chukyo University), Sanaz Taleghani (Qazvin Azad University)
Organizing Committee:
Francesco Amigoni (Politecnico di Milano), Shimizu Masaru (Chukyo University), Sanaz Taleghani (Qazvin Azad University)
Rules
The current version of the rules for the RoboCup 2016 Virtual Robot Competition is version 1.5 – March 8, 2016. The rules are the output of The Future of Robot Rescue Simulation Workshop. The participating teams are encouraged to be engaged in the discussion, even when they were not present at the workshop.
Call for Participation
We would like to invite all robot rescue teams to participate in the 2016 RoboCup Rescue Simulation League World Championship. If you are interested to participate please take the time to pre-register your team for the RoboCup 2016 Virtual Robot Competition as soon as possible, so that we can inform you about the latest developments.
1) RoboCup Rescue Simulation League and Virtual Robot Competition
The RoboCup Rescue Simulation League is a socially relevant part of RoboCup event. Its main purpose is to provide emergency decision support by integration of disaster information, prediction, planning, and human interface.
A generic urban disaster simulation environment is constructed on network computers. Heterogeneous intelligent agents such as firefighters, commanders, victims, volunteers, etc. conduct search and rescue activities in this virtual disaster world. Real-world interfaces such as helicopter images synchronize the virtuality and the reality by sensing data. Mission-critical human interfaces such as PDAs support disaster managers, disaster relief brigades, residents, and volunteers to decide their action to minimize disaster damage.
Addressing this problem involves advanced and interdisciplinary research themes. As AI/robotics research, for example, behavior strategy (e.g., multi-agent planning, real-time/anytime planning, heterogeneity of agents, robust planning, mixed-initiative planning) is a challenging problem. For disaster researchers, RoboCup Rescue works as a standard basis in order to develop practical comprehensive simulators adding necessary disaster modules.
The next version of the Virtual Robot Competition is based on ROS/Gazebo, an advanced robot simulator in which users can simulate multiple agents whose capabilities closely mirror those of real robots. ROS/Gazebo currently features several ground and air robots, as well as a wide range of sensors and actuators. Moreover, exploiting ROS, users can easily develop their robot systems integrating standard modules. Note that the 2016 Virtual Robot Competition will be based on the new simulator and on the rules that will be available just after The Future of Robot Rescue Simulation Workshop. A document describing the architecture of the new simulator is available here, while part of the code is available here.
2) Pre-registration
For the pre-registration please send before an email to francesco.amigoni@polimi.it with as attachment the following form filled in: http://www.robocuprescue.org/wiki/images/IntentVirtual2016.txt
3) Qualification material
Please prepare before March 30, 2016, a Team Description Paper describing the most innovative contributions or scientific results your team is intended to provide. The TDP is limited to 8 pages and must be formatted according to the LNCS format.
The Team Description Paper is an overview of the methodologies you used and intend to use to control your robots inside the Virtual Robot Competition. If applicable, include a reference to your latest publications. Given the reduced time between the end of The Future of Robot Rescue Simulation Workshop and the deadline for qualification material, the qualification material should reflect the team ideas and intentions rather than being a technically detailed document.
The qualification material should be placed on a dedicated web page on the team’s home page. Please include the link to the qualification material on the pre-registration information.
Pre-registered teams
The following teams have preregistered until now (in no particular order):
- GUC_ArtSapience – German University in Cairo, Egypt (homepage)
Dina Helal et al.
- Hinomiyagura – Meijo University and Chukyo University, Japan (homepage)
Masaru Shimizu et al.
- Yildiz – Yildiz Technical University, Turkey (homepage)
Sırma Yavuz et al.
- UNIGE PMAR LAB – University of Genoa, Italy
Jesus Hiram Lugo Calles et al.
- MRubix – Mecarobix Industrial Group, Iran (homepage)
Seyed Mohammad Mavaei et al.
- MRL – Qazvin Azad University, Iran (homepage)
Mohammad Hossein Shayesteh et al.
Previous Competitions
See the archive of http://www.robocuprescue.org/.